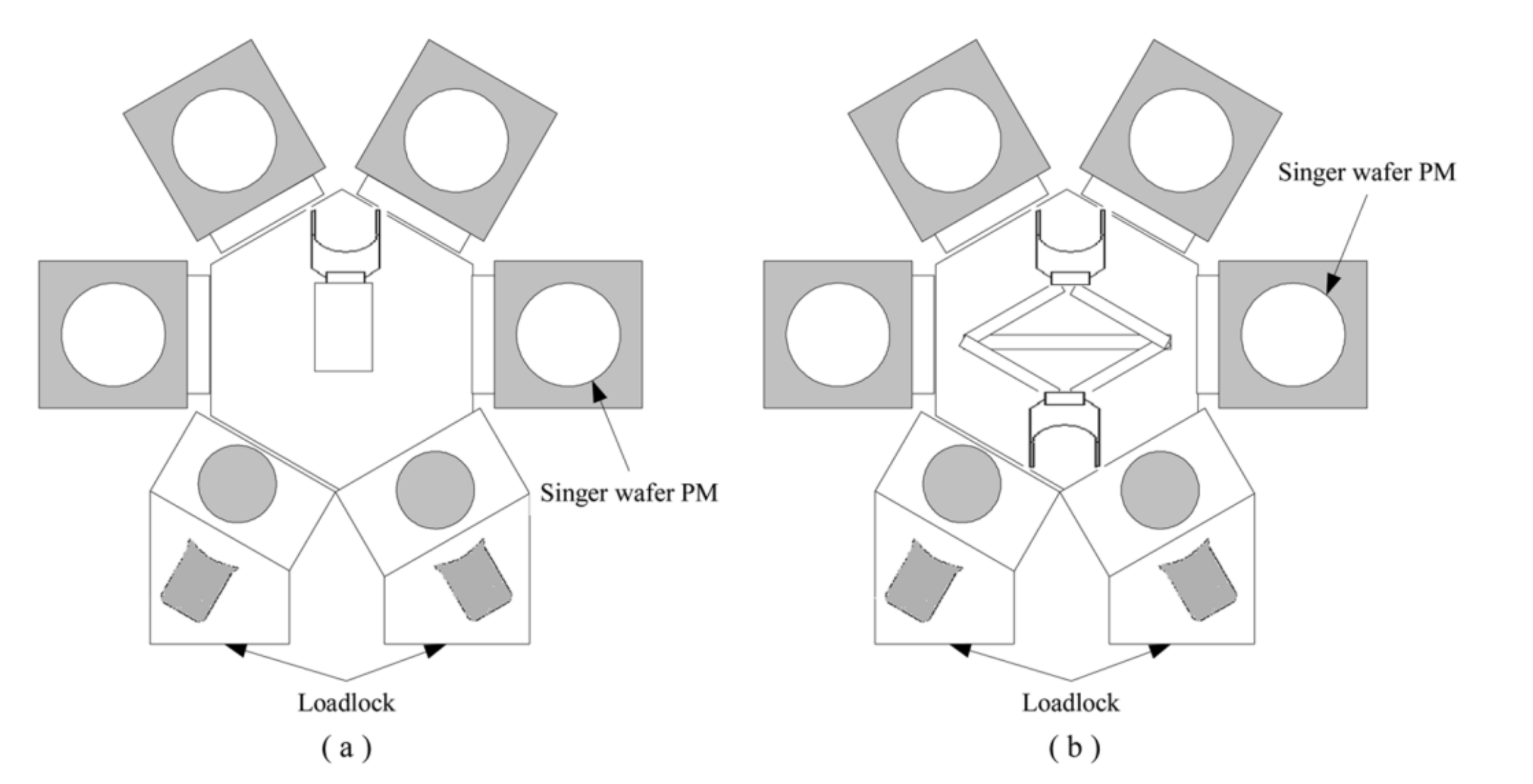
Fig. 1. Cluster tools: (a) single-arm robot and (b) dual-arm robot.
Fig. 2. Role-based Collaboration (RBC )
Research Interests
Semiconductor Manufacturing Systems
Scheduling and Optimization
Role-based Collaboration (RBC )
Human-Machine Systems
Computational Social Simulation
Pre-print
Q. Jiang, D. Liu, H. Zhu, B. Huang , N. Wu, and Y. Qiao*, Group Role Assignment with Minimized Agent Conflicts IEEE Transactions on Systems, Man, and Cybernetics: Systems (IEEE T-SMC: SYSTEMS ) , 2023.
Q. Jiang, D. Liu, H. Zhu, B. Huang , N. Wu, and Y. Qiao*, Quasi Group Role Assignment with Agent Satisfaction in Self-Service Spatiotemporal Crowdsourcing IEEE Transactions on Computational Social Systems (IEEE T-CSS ) , 2023.
Selected Refereed Publications [Full List] Selected Journal Papers
B. Huang , H. Zhu, D. Liu*, N. Wu, Y. Qiao, and Q. Jiang, Solving Last-Mile Logistics Problem in Spatiotemporal Crowdsourcing via Role Awareness With Adaptive Clustering IEEE Transactions on Computational Social Systems (IEEE T-CSS ) , vol. 8, no. 3, pp. 668-681, 2021. [Code ]D. Liu, B. Huang , H. Zhu* Solving the Tree-Structured Task Allocation Problem via Group Multirole Assignment IEEE Transactions on Automation Science and Engineering (IEEE T-ASE ) , vol. 17, no. 1, pp. 41-55, 2020. [Code ]
Q. Jiang, D. Liu, H. Zhu, Y. Qiao, and B. Huang* , Quasi Group Role Assignment With Role Awareness in Self-Service Spatiotemporal Crowdsourcing IEEE Transactions on Computational Social Systems (IEEE T-CSS ) , vol. 9, no. 5, pp. 1456-1468, 2022. [Code ]
Q. Jiang, D. Liu, H. Zhu, Y. Qiao, and B. Huang* , Equilibrium Means Equity? An E-CARGO Perspective on the Golden Mean Principle IEEE Transactions on Computational Social Systems (IEEE T-CSS ) , vol. 10, no. 4, pp. 1443-1454, 2023. [Code ]
Selected Conference Papers